 Die Inhalte gefallen Dir?
Die Inhalte gefallen Dir?Erstellt am 26.08.2006
Einleitung
Dies ist der erste Roboter, den ich zusammen mit meinen beiden Freunden für Jugendforscht entwickelt habe. Die Idee war, dass der Roboter lässtige Arbeiten, wie z.B. das Rasenmähen erledigen sollte. Solche Roboter gibt es ja in der Tat schon, allerdings sind diese gelinde gesagt, ziemlich dähmlich!
Sie fahren so lange in eine Richtung, bis sie irgendwo anstoßen oder über ihren Markierungsdraht fahren. Dann drehen sie sich ein Stück und fahren weiter.
Wir dachten uns, dass das auch effizienter geht und überlegten, was man braucht, damit der Roboter in schönen Bahnen das Gras mäht. Herausgekommen ist die Idee, dass es doch schön wäre, wenn der Roboter wüsste, wo genau er sich auf der Wiese befindet und danach navigieren kann.
GPS schied schnell aus, da die Genauigkeit auf maximal 1m doch etwas zu schlecht ist. Also entwickelten wir unser eigenes Navigationssystem: LaGuNaSys: LaserGuydedNavigationSystem.
Es basiert auf Peilung von drei Sendetürmen und ermöglicht uns eine Genauigkeit von etwa 2-3cm. Das Problem am LaGuNaSys waren allerdings die Laser, die wir parallel zum Boden über rotierende Spiegel ablenkten. Denn die Motoren, mit den im 45° geneigten Speigeln konnten wir nie so ausrichten, dass die Laserstrahlen wirklich gerade abgelenkt wurden.
Damit trafen die Laser nicht immer in den Sensor auf dem Roboter und dieser konnte nicht mehr navigieren. Außerdem sprachen die Fotowiderstände in unserem Sensor, die wir zum erkennen des Lasers nutzen wollten bei zu hohen Drehzahlen der Sender nicht mehr an - die "Belichtungszeit" war einfach zu kurz.
Aus Zeitdruck heraus konnten wir leider auch die Ultraschallsensoren nicht mehr verwirklichen und das Programm, wollte auch noch nicht so, wie wir es wollten.
Alles in Allem bekamen wir dann nach dem Wettbewerb immerhin den Sonderpreis des VDI (Verein deutscher Ingenieure) und wir machten uns daran das System zu verbessern: daraus entstand der zweite Roboter: IrGuNaSys, dessen Seite jetzt auch hoffentlich bald mal fertig wird.
Technische Daten
In dieser Sektion möchte ich gerne die technischen Daten des Roboters auflisten.
| Größe | (L x B x H) 50cm x 50cm x 30cm |
| Gewicht | ca. 12kg |
| Stromversorgung | ein 12V-Bleigelakku (10Ah), ein 6V-Bleigelakku (7Ah) |
| Antrieb | 2 Scheibenwischermotoren; pro Rad einer zum Antrieb, wie bei einer Planierraupe |
| Geschwindigkeit | ca. 4km/h |
| Recheneinheiten | ein 386er Notebook und ein C-Control II |
| Funkübertragung | RS232 über Bluetooth |
| Laser der 3 Senebarken | 5mW Klasse 3A |
Das Notebook, befand sich unter der Grundplatte und musste die ziemlich komplexe Formel zur Koordinatenberechnung übernehmen. Das C-Control war für die Motorsteuerung zuständig und wertete den Sensor aus. Die Daten vom Sensor gingen dann wiederum auch in das Notebook, was daraus dann die Position innerhalb der drei Sendebarken berechnen konnte. Auf dem Notebook lief ein DOS6.22 und den Roboter hatten wir der Einfachheit halber in QBasic programmiert. Damit ist besonders leicht das Ansprechen der Schnittstellen möglich und da das C-Control die Motoren übernahm, war es auch nicht weiter schlimm, dass QBasic keine Threads beherrscht.
Über das Bluetoothmodul konnten wir unserem Roboter die Befehle, bzw. neue Koordinaten geben. Das war vorallem deswegen von Nöten, weil wir an das Notebook nicht ohne weiteres dran kamen, da es ja unter der Grundplatte verstaut war.
Der Motortreiber, der die Motoren ansteuert, ist ebenfalls auf der Seite hier unter Fahrtenregler für zwei Motoren. Das besondere an der Schaltung ist, dass sie nur zwei Richtungseingänge, sowie zwei Geschwindigkeitseingänge benötigt, um die Motoren des Roboters von einander getrennt zu steuern. Mit der schaltung kann der Roboter alle vier richtungen fahren (vor- und rückwärts, sowie Links- und Rechtsdrehung) und jeder Motor lässt sich beliebig schnell oder langsam drehen.
Diese Schaltung spart gegenüber herkömmlichen H-Brücken-Reglern zwei Pins und erleichtert die Programmierung.
Die Sendebarken hatten jeweils ein eigenes Akkupack, weswegen man sie an beliebier Stelle aufstellen konnte, ohne erst Kabel zu legen.
Bilder
Als letztes kommen natürlich noch ein Haufen Bilder von dem Gerät
 |
 |
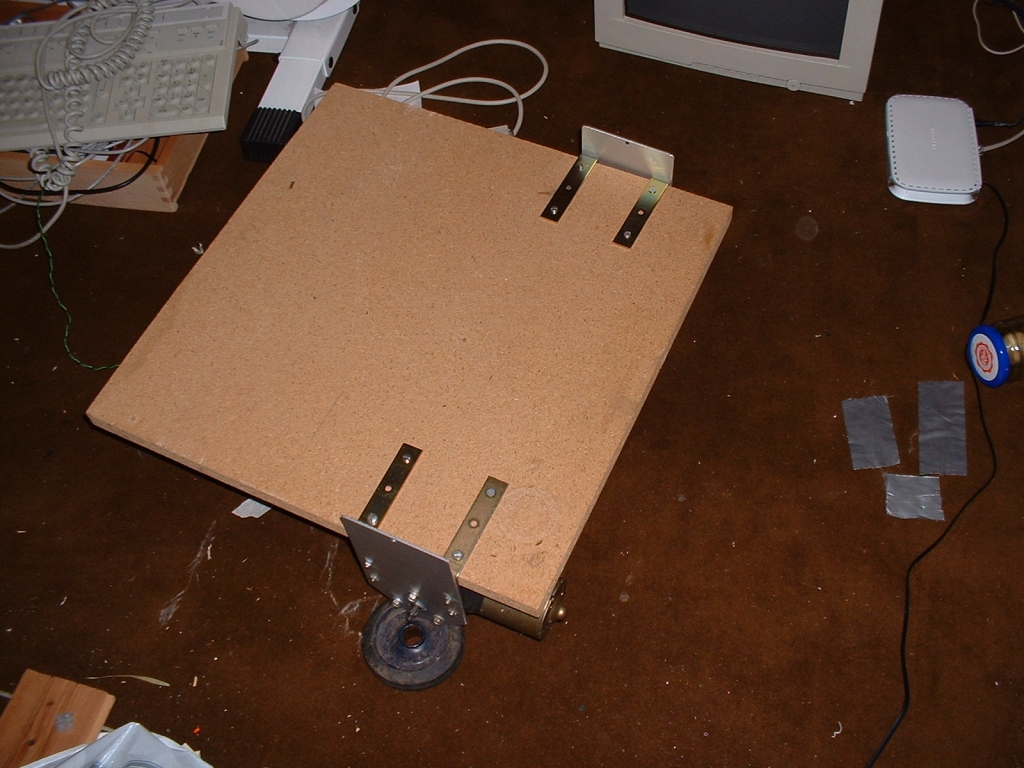
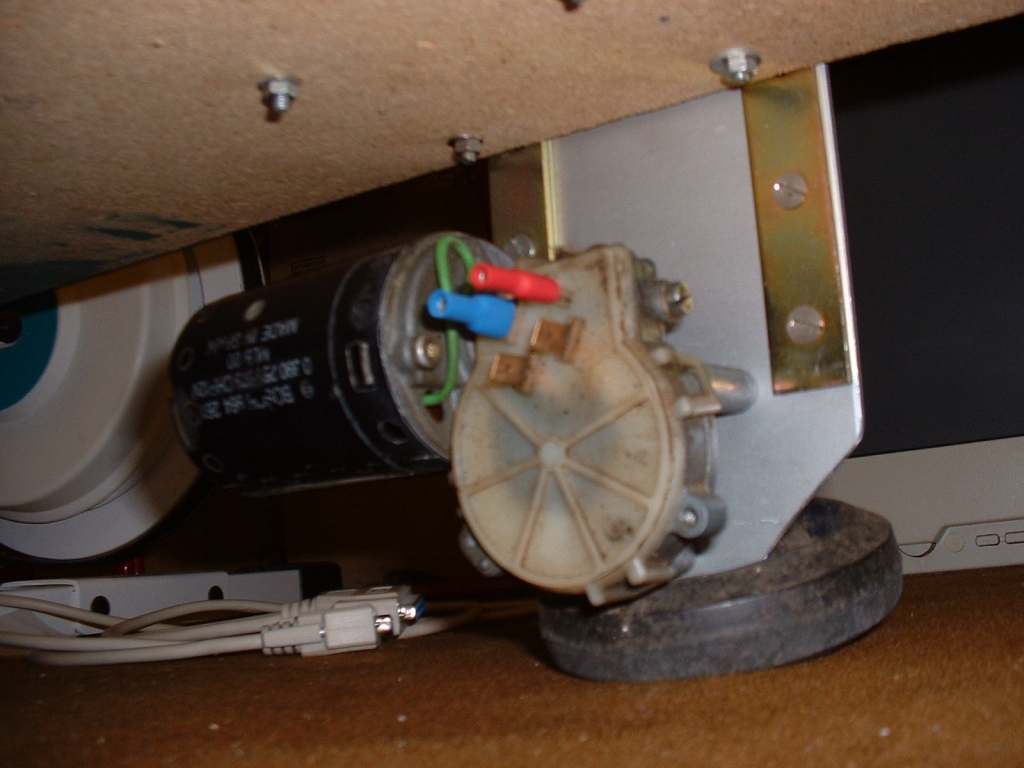
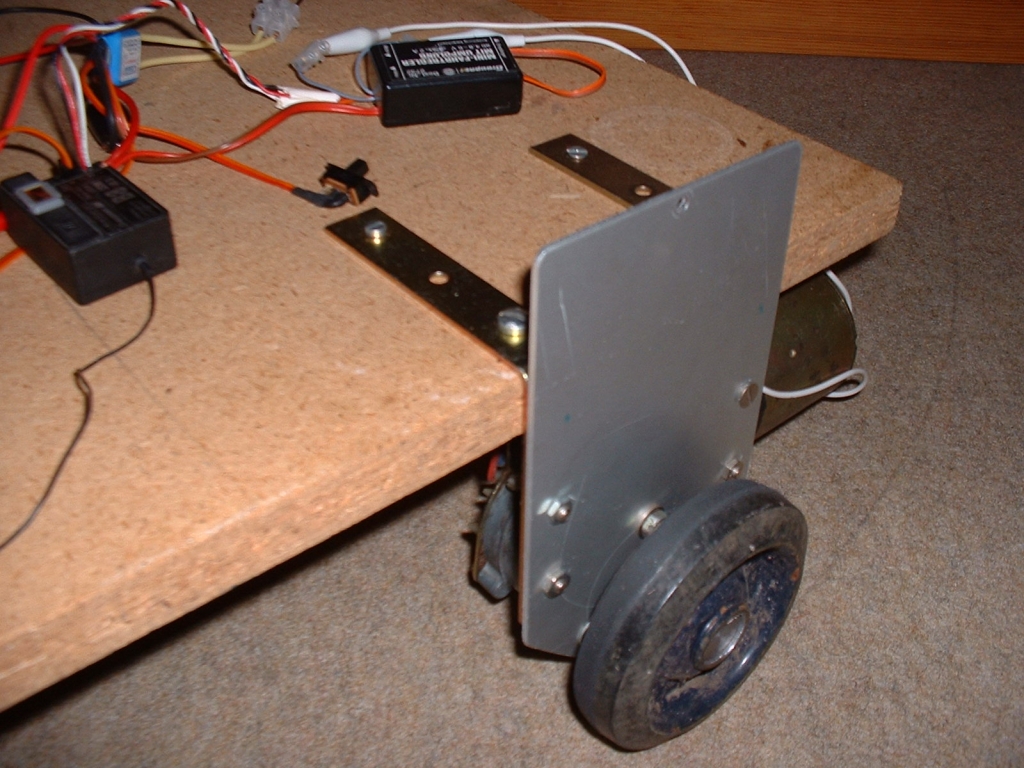
| das sind die ersten Bilder | hier das Blech zur Motorbefestigung |
 |
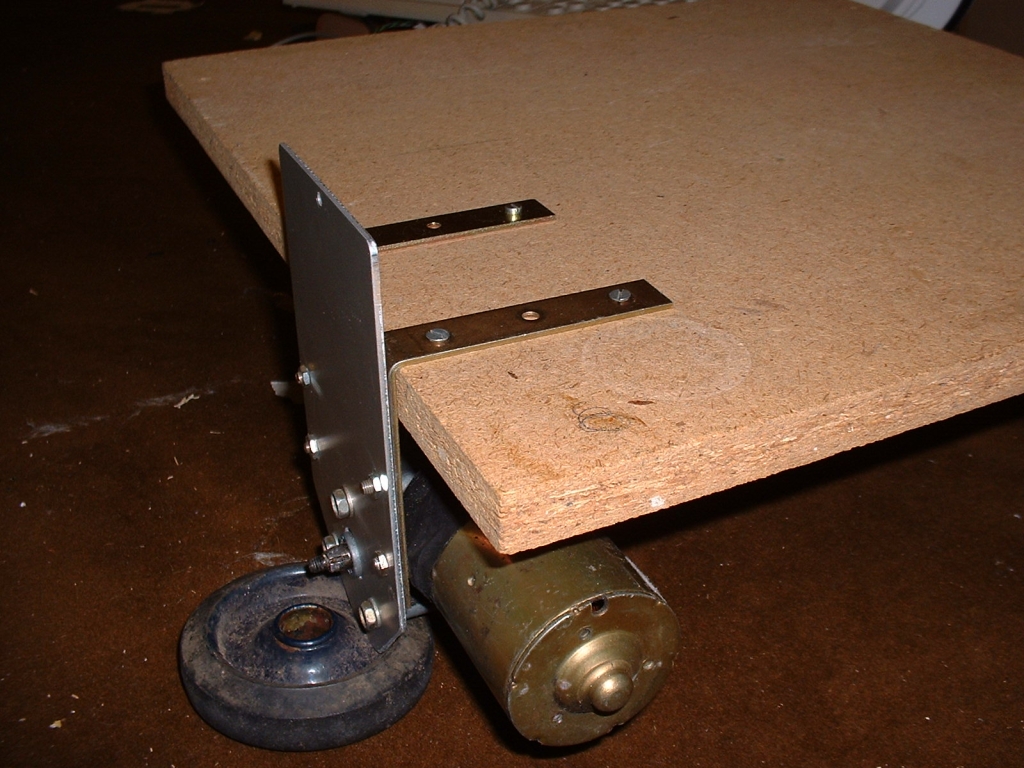 |
| die Motorbefestigung nochmal von hinten | und nochmal aus nem anderen Winkel |
 |
 |
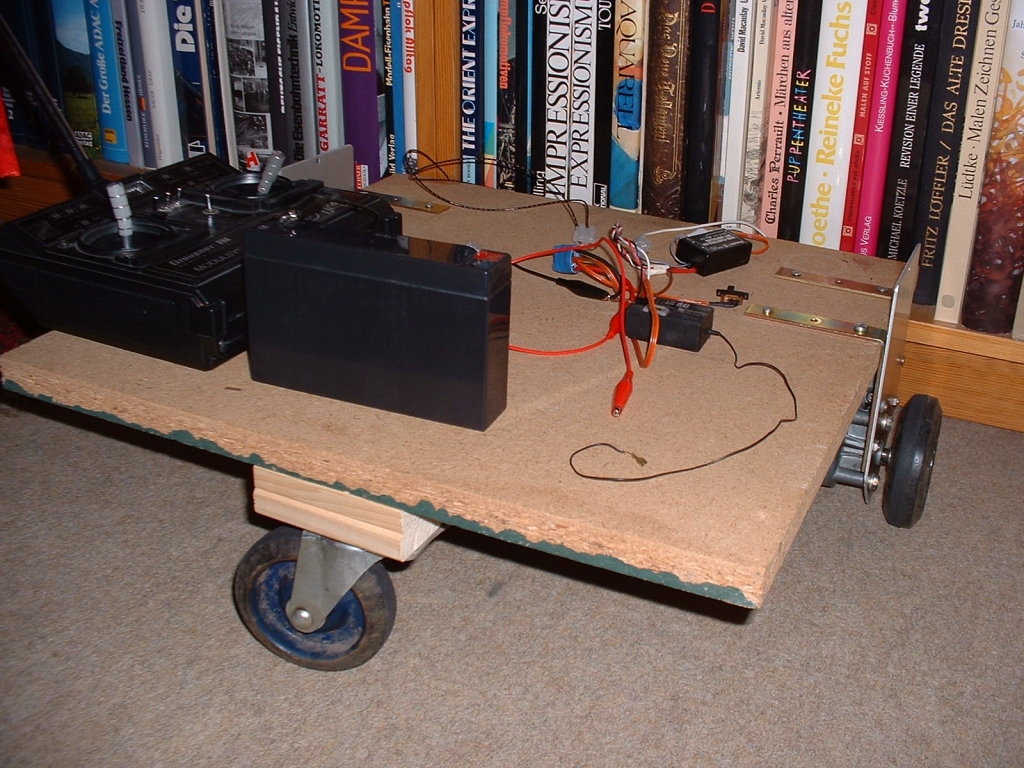
| da hab ich das Ding mal mit ner Fernsteuerung versehen | schön zu sehen ist der 6V-Bleiakku |
 |
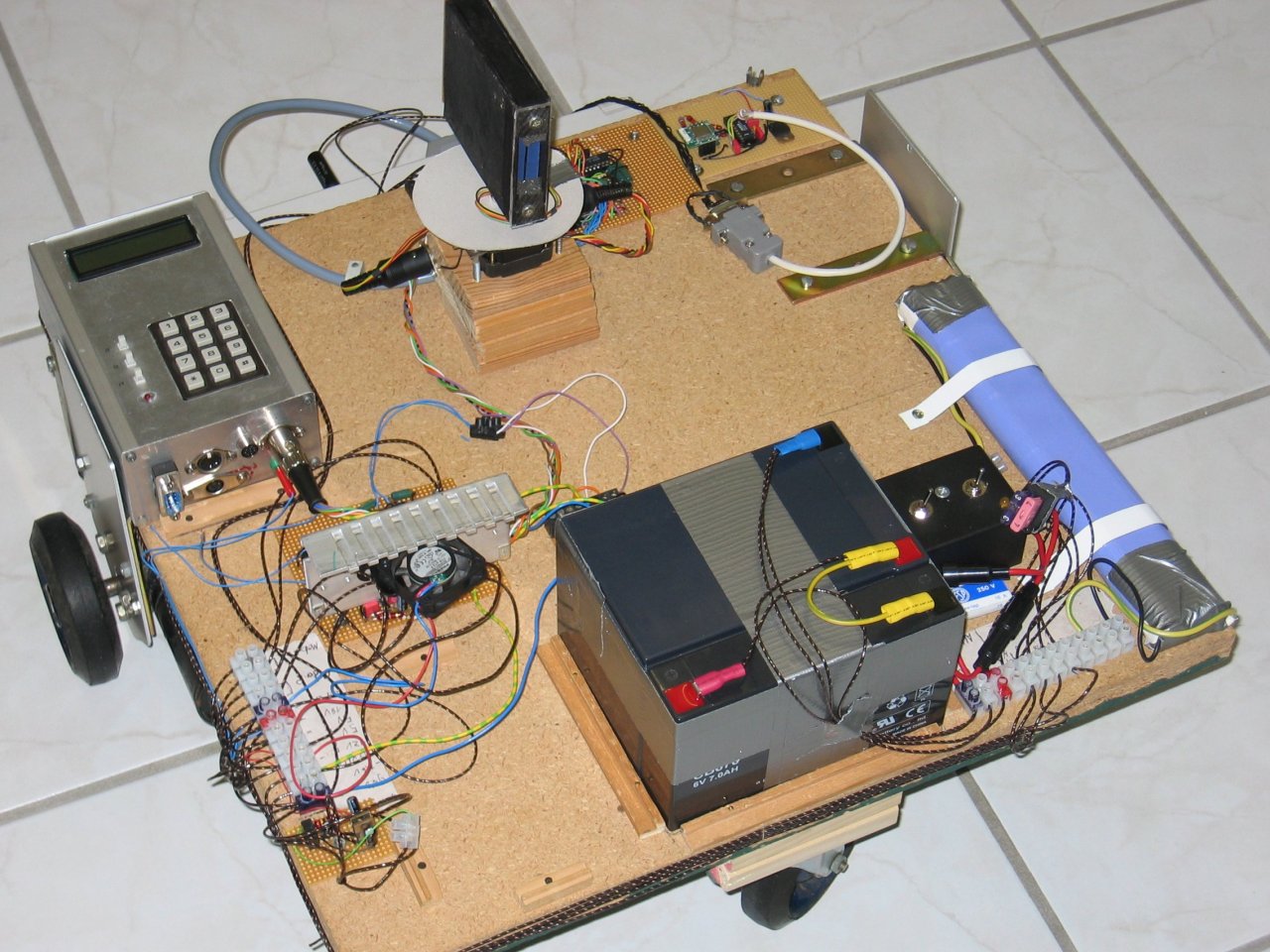 |
| nochmal ne Nahaufnahme vom Motor mit Rad | und hier das Ding, als es fertig war... |
 |
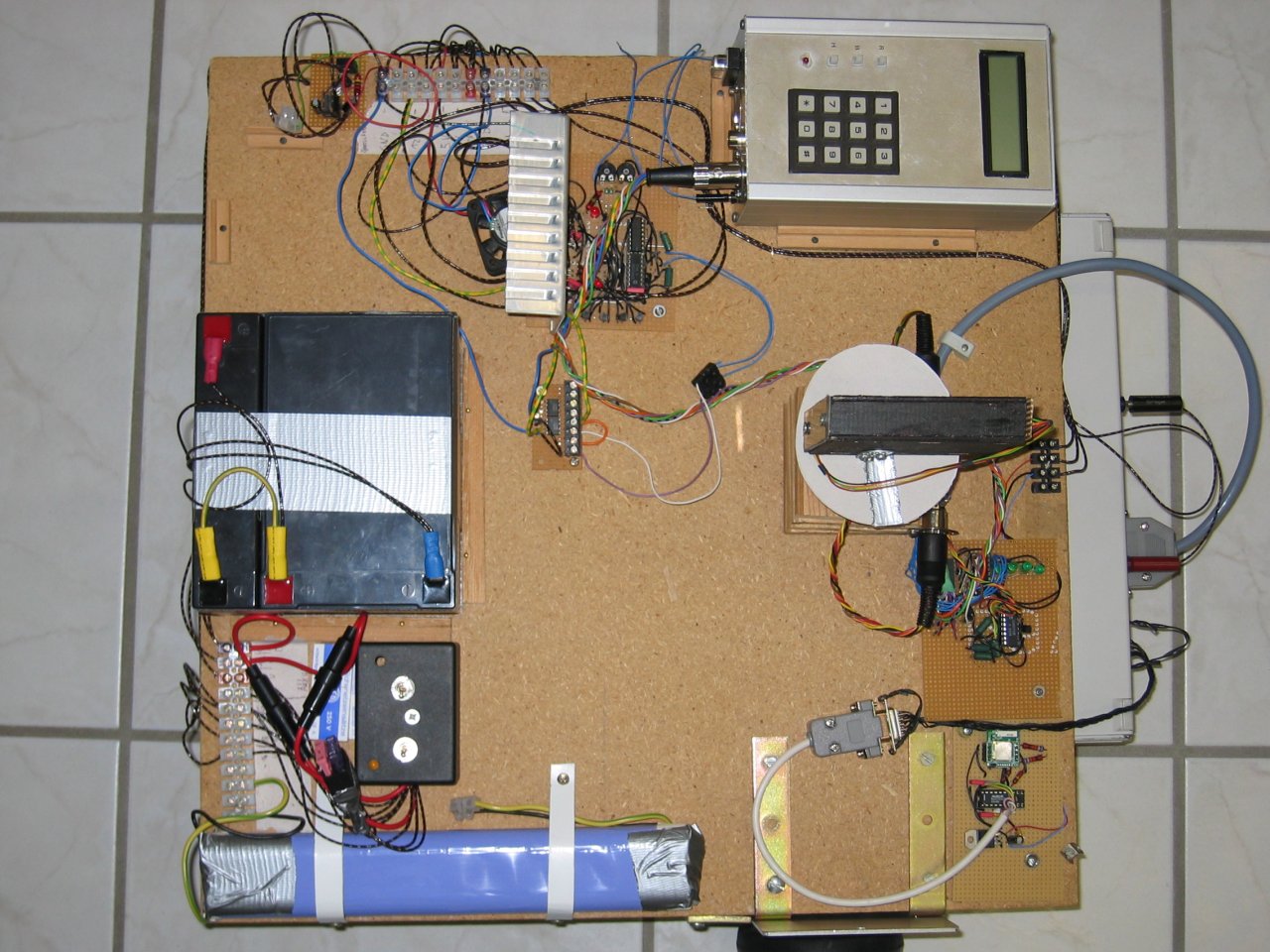 |
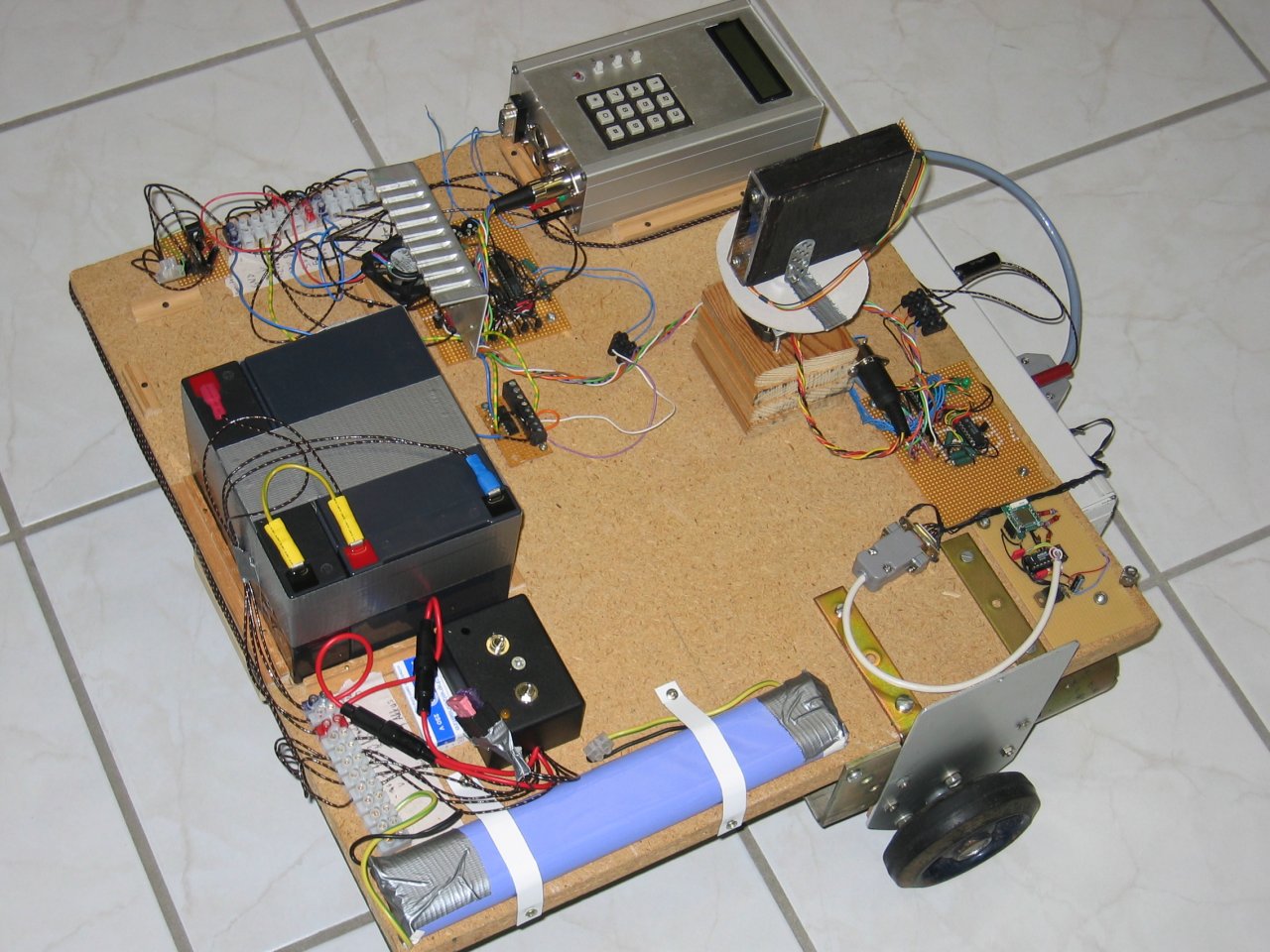
| ...in allen... | ...drei Winkeln |
 |
 |
| schließlich noch von vorne | und zum Schluss ich selber beim basteln  |
Wenn ihr noch Fragen dazu habt, dann fragt. Ich habe allerdings bewusst nicht all unsere Geheimnisse verraten, weil wir immernoch dran forschen und uns noch überlegen, ob wie all unsere Ergebnisse wirklich in die Welt hinauspusaunen wollen. Immerhin stecken da jetzt über ein Jahr Arbeit drin und unser Nachfolger profitiert von all unseren Erfahrungen.