 Die Inhalte gefallen Dir?
Die Inhalte gefallen Dir?Erstellt am 27.05.2006
Das Projekt
Das war mein erster Roboter, (der auch den Namen Roboter verdient) den ich mir zusammengebastelt habe.
Ich hatte mir schon eine ganze Zeit lang mal vorgenommen einen zu bauen, aber was ich bisher
gebastelt hatte waren nur Plotter aus Lego, die ich über eine Relaiskarte ansteuerte oder
kleine Fahrzeuge aus Fischertechnik, die ich mit einem Joistick und Basic-Programmierung
über den Tisch fahren ließ.
Das nächste Modell war ebenfalls aus Fischertechnik und hatte seitlich zwei lange Taster, sowie
vorne einen. Aber so richtig wollte das nicht funktionieren. Also suchte ich mir eines schönen
Tages :D eine Holzplatte und montierte darauf die Relaiskarte und unten dran zwei Räder, sowie
vorne eine kleine Rolle von einem Spielzeugeinkaufswagen. Das war mein Grundgerüst, was ich nun
vorerst wieder nur über Tastatur fernsteuerte.
Da ich schon mal den Joistick unter Basic programmiert hatte wusste ich, dass am Gameport vier
Eingänge zur Verfügung standen, die ich nutzen wollte. Nach etwa einem Tag, an dem ich etwa 10 je
5m lange Kabel um das Druckerkabel für die Relaiskarte gewickelt hatte konnte ich also Signale
vom Roboter empfangen.
Als sensoren hatte ich damals nur ein paar alte Fotowiderstände, die ich vorne an den Roboter
montierte. Ein bischen Programmieren und der Roboter konnte meiner Taschenlampe folgen...
|
|
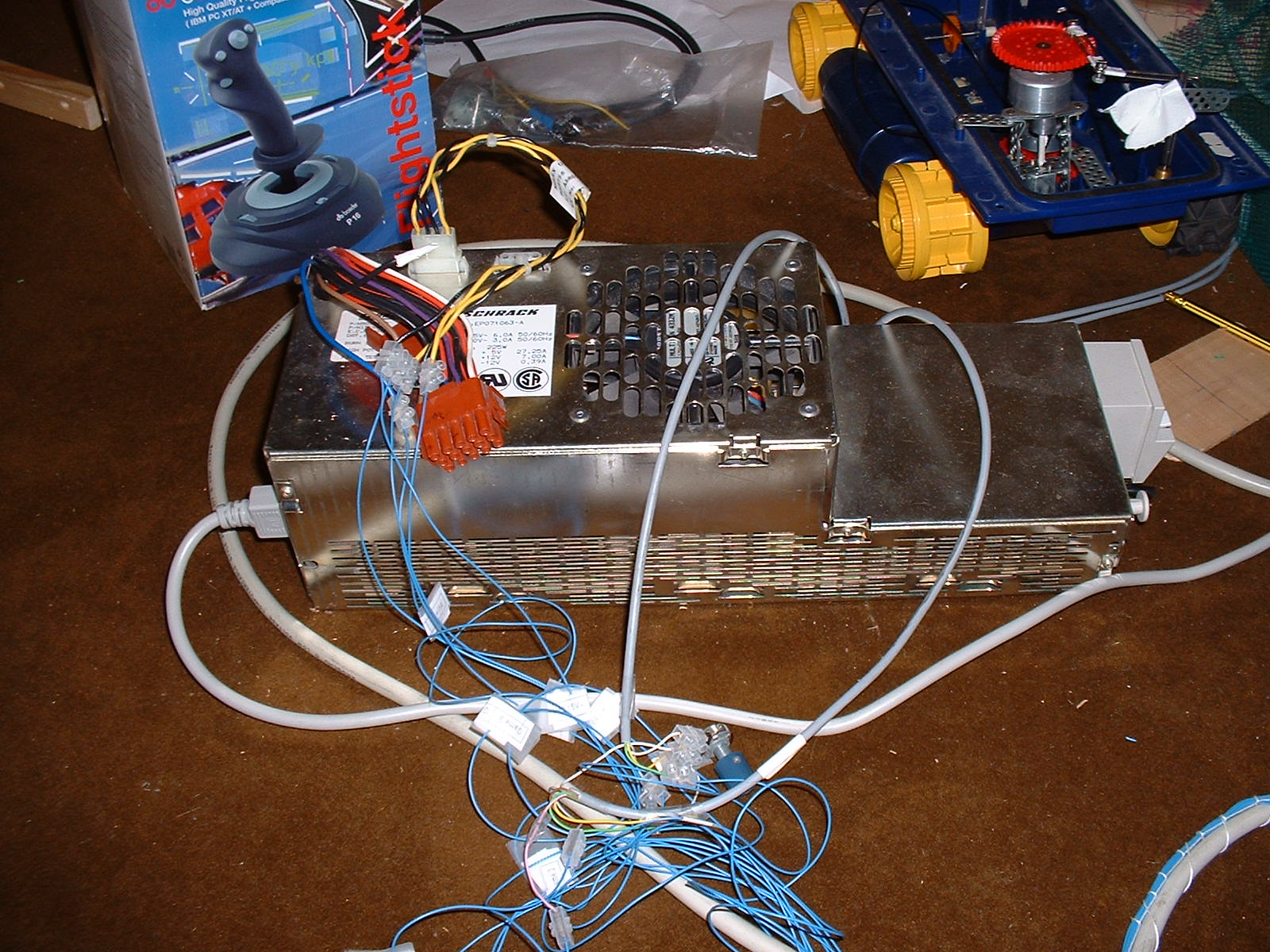
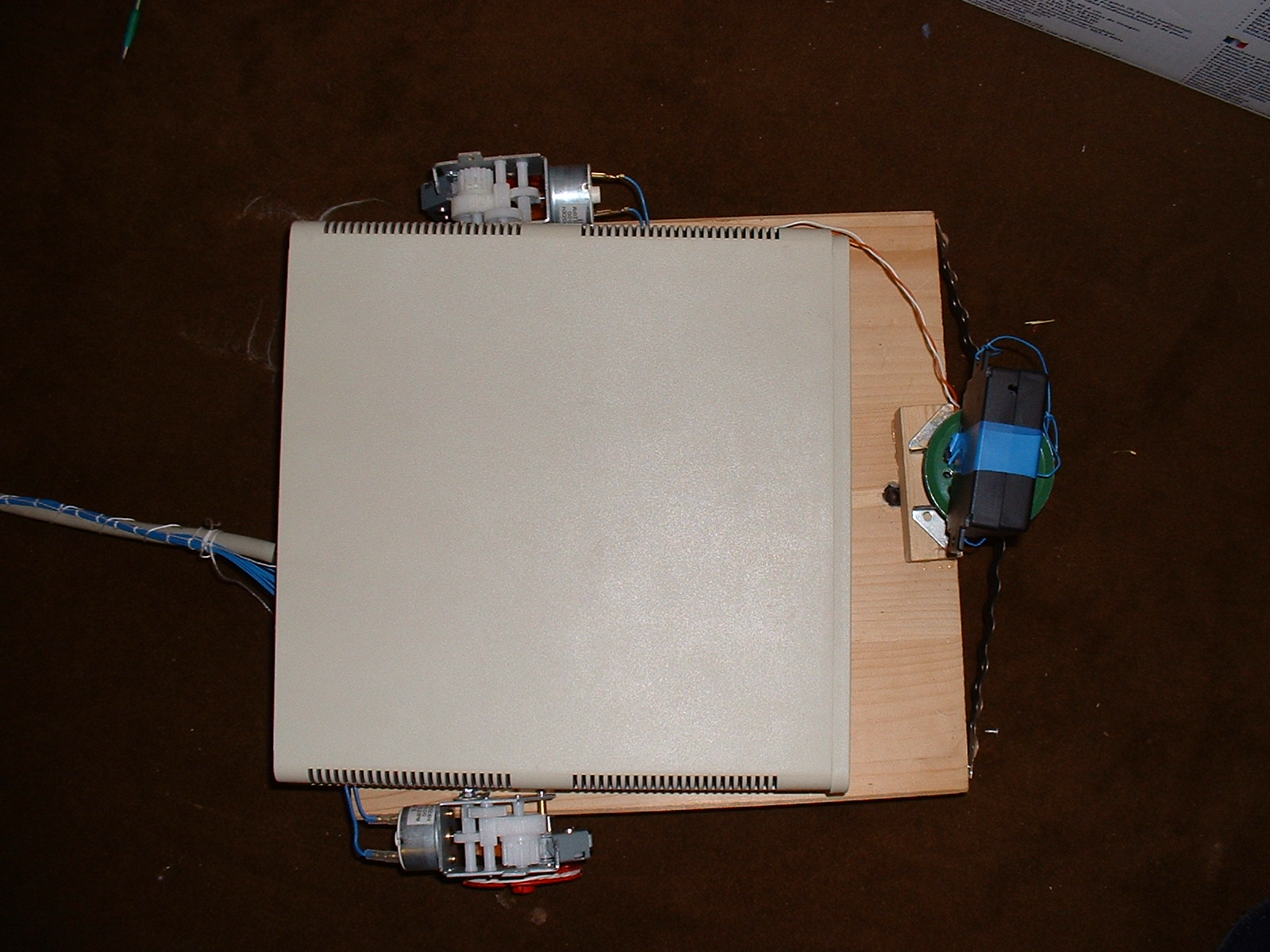
| Stromversorgun war ein altes PC-Netzteil von einem 80286er | Der Roboter wie er von oben aussieht (bereits mit Gehäuse) |
|
|
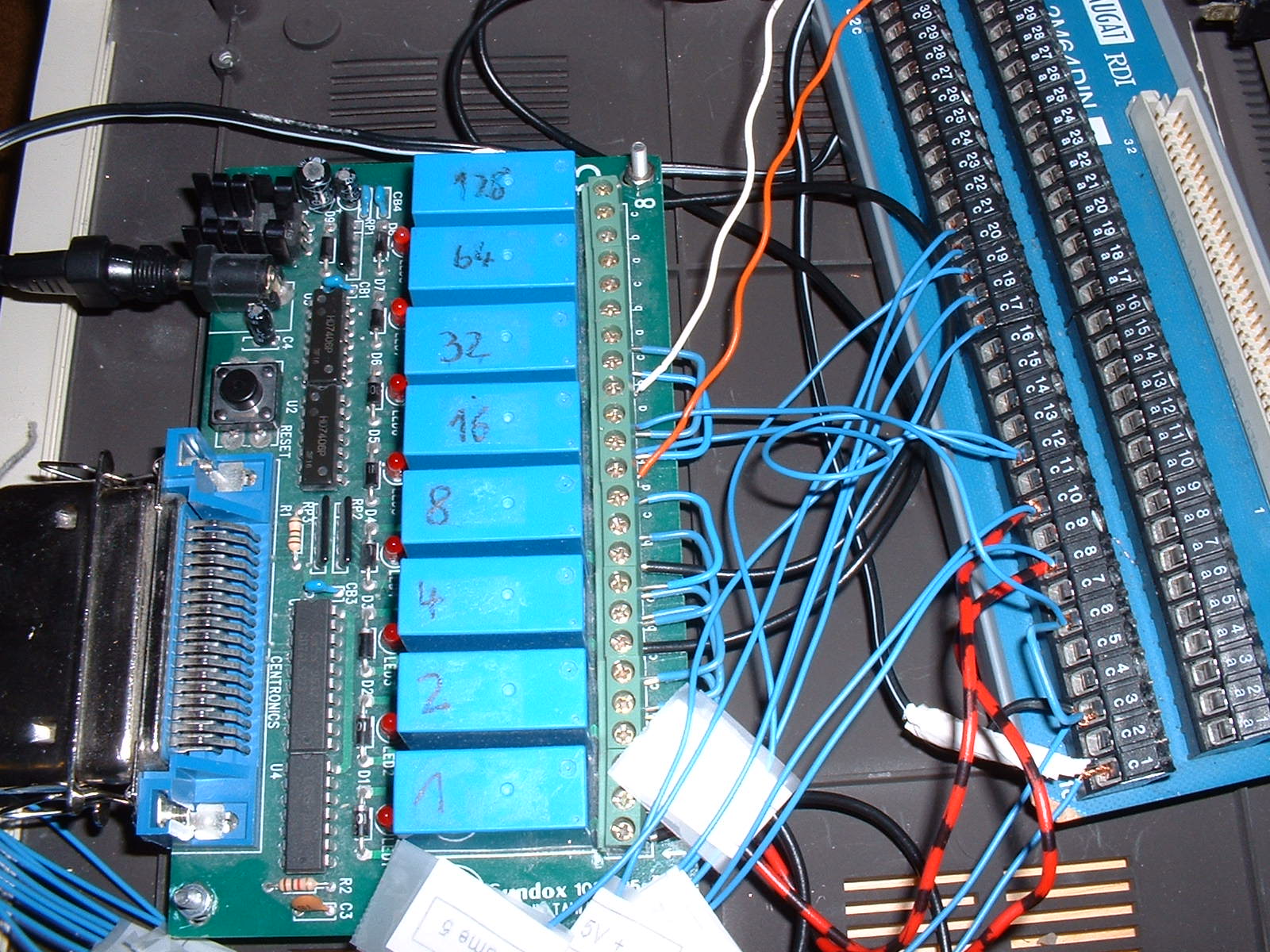
| Und hier die Relaiskarte und der Kabelstrang, der in ihr mündet |
Das nächste war jetzt die Hinderniserkennung hinzubekommen. Dazu musste erstmal ein Ultraschallsensor her. Da dieser leider für mich damals sehr teuer war hab ich mir nur einen gekauft. Leider war der aber
nicht besonders gut: man bekam ein High, wenn der Sensor irgendwas erhaschen konnte, aber leider nichts genaueres, wie z.B. Entfernung oder der gleichen. Auch versagte er schnell bei Stoff oder zu schrägen Wänden.
Um den Raum vor dem Roboter abzusuchen setzte ich den Sensor nun kurzerhand auf einen Motor, der jeweils links und rechts zwei Schalter hatte. Damit drehte sich der Sensor immer von einem zum anderen Schalter. Nach vielem Programmieren konnte der Roboter nun einigermaßen eine Wand erkennen und stehenbleiben.
Damit war ich nun recht zufrieden und stellte den Roboter in die Ecke, da ich gerade die Schrittmotoren entdeckt hatte und damit rumspielte und unter anderem meine Ätzmaschine zusammenbaute. Deswegen hab ich diesen Roboter irgendwann wieder zerlegt.
Technische Daten
Hier nun ein kleiner Ausflug zu den Features und Daten des Roboters:
| Maße: | |
| Länge: | 39cm |
| Breite: | 37cm |
| Höhe (mit Sensor): | 18cm |
| Höhe (ohne Sensor): | 13cm |
| Gewicht: | 2,4kG |
| Antrieb: | zwei 24V Getriebemotoren |
| Fahrwerk: | drei Räder, davon werden 2 angetrieben |
| Steuerung: | |
| Stromsteuerung: | 8-Kanal Relaiskarte (über LPT1) |
| Recheneinheit: | 80486 SIEMENS NIXDORF PCD-4T |
| Stromversorgung | |
| 5V | 27,25A |
| 12V | 7,00A |
| 24V | 0,4A |
| 3V | 1,00A |
| Programmierung | |
| Programmiersprache: | QBasic |
| Betriebsystem: | DOS |
Weitere Bilder
Und zum abschluss noch ein paar weitere Bilder des Roboters:
 |
 |
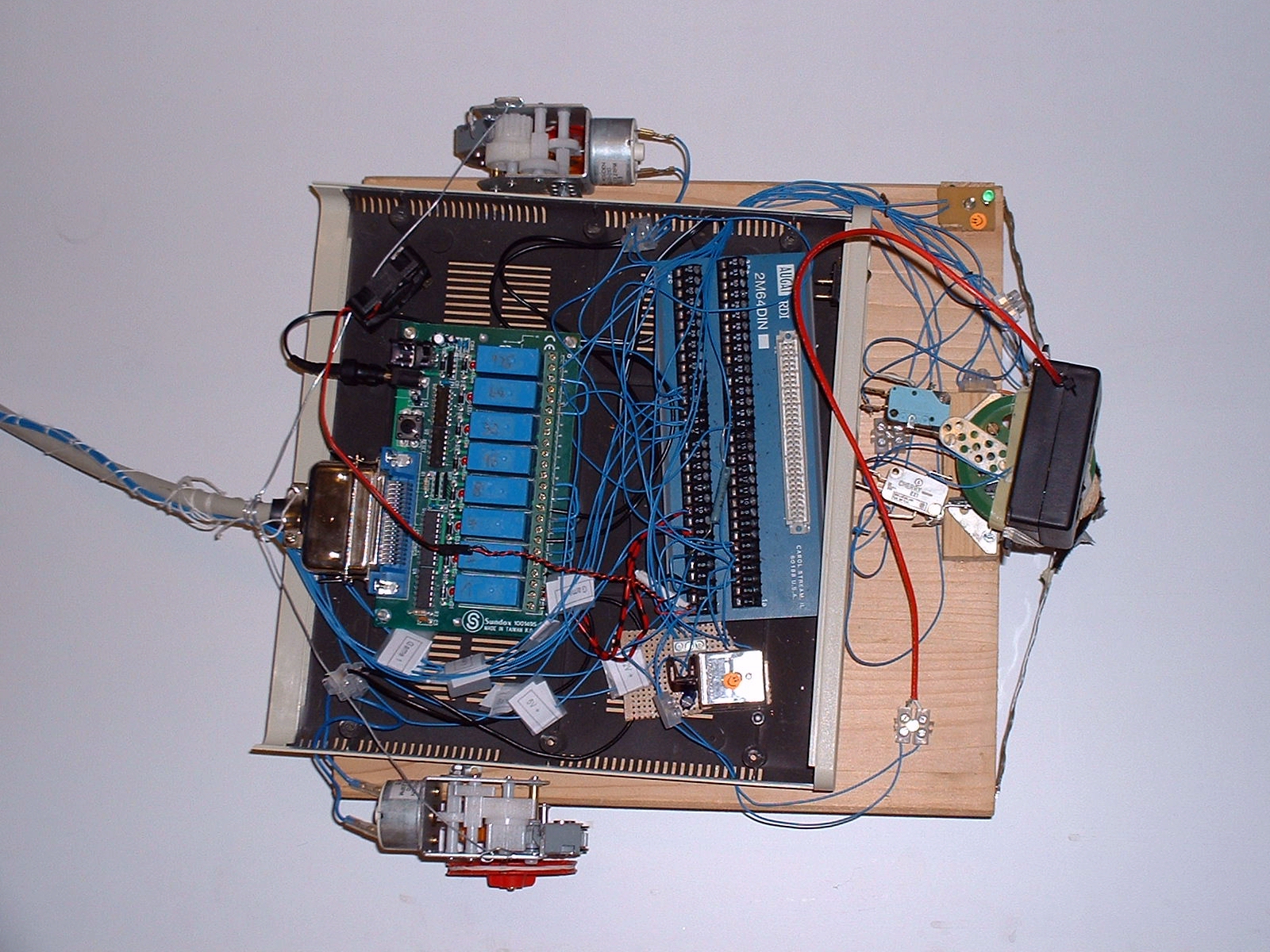
| Hier das Gerät mal offen | eine kleine Klemmenreihe vom Sperrmüll mit der ich ohne Löten verkablen konnte |
 |
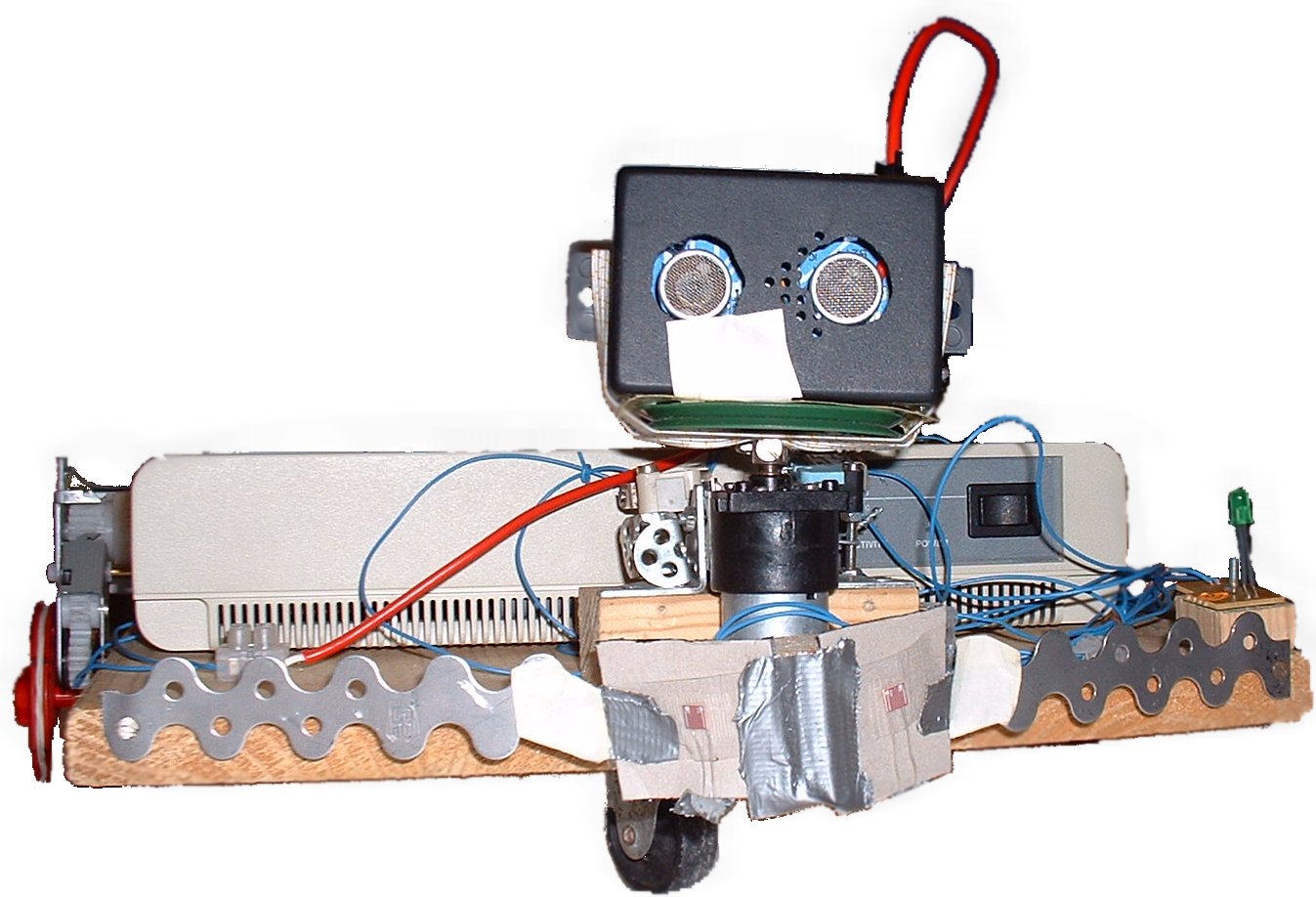 |
| Und das Ding noch mal von der Seite | Und das ist das Paradefoto von vorne  |