 Die Inhalte gefallen Dir?
Die Inhalte gefallen Dir?Erstellt am 14.08.2008
Roboterprojekt IrGuNaSys
Hier nun einige kurze Infos zur neuen Version des Roboters:
Nachdem wir die designtechnischen Schwächen des alten Geräts aufgedeckt hatten, konnte der Bau des neuen Geräts beginnen. Wichtig war, dass diesmal der Drehpunkt in der Mitte saß, sodass auch der Sensor in der Mitte montiert werden konnte. Außerdem sollte ein robusteres Fahrgestell, ein leistungsstärkerer Prozessor und größere Akkus die Möglichkeit bieten, durch unwegsames Gelände zu fahren, die Koordinatenberechnung in kürzerer Zeit abzuschließen und nicht zu letzt eine längere Betriebszeit erlauben.
Die Sendebarken, die im ersten Modell mit Laserstrahlen arbeiteten und damit im sichtbaren Lichtspektrum arbeiteten, waren anfällig für Tageslicht, weshalb wir nun auf codierte IR-Sendebarken setzen, die wesentlich störunempfindlicher sind. Das Peilungsprinzip ist das alte geblieben, die Software findet jetzt auf einem Linuxsystem ihren Platz und ist im Moment in C realisiert.
Um auch während des Betriebs die aktuellen Daten einsehen zu können und in späteren Versionen vielleicht sogar eine Karte des geländes zur Verfügung zu stellen, beherbergt das Gerät jetzt auf der oberen Plattform auch einen TFT und eine Tastatur. An der Seite befindet sich die Festplatte in Form einer CF-Karte. Damit lassen sich auf einfache Weise die Software updaten oder Backups erstellen.
Leider ist das Projekt jedoch aus mangel an Zeit und wohl auch an Elan relativ auf Eis gelegt und die Weiterentwicklung wartet noch auf sich.
Bilder vom Roboter
Natürlich sollen auch hier die Bilder nicht fehlen, damit ihr einen kleinen Einblick erhaltet, wie das tolle Teil denn jetzt aussieht.
 |
 |
| So sieht er in seiner Vollendung aus | Und ein Bild vom Aufbau |
 |
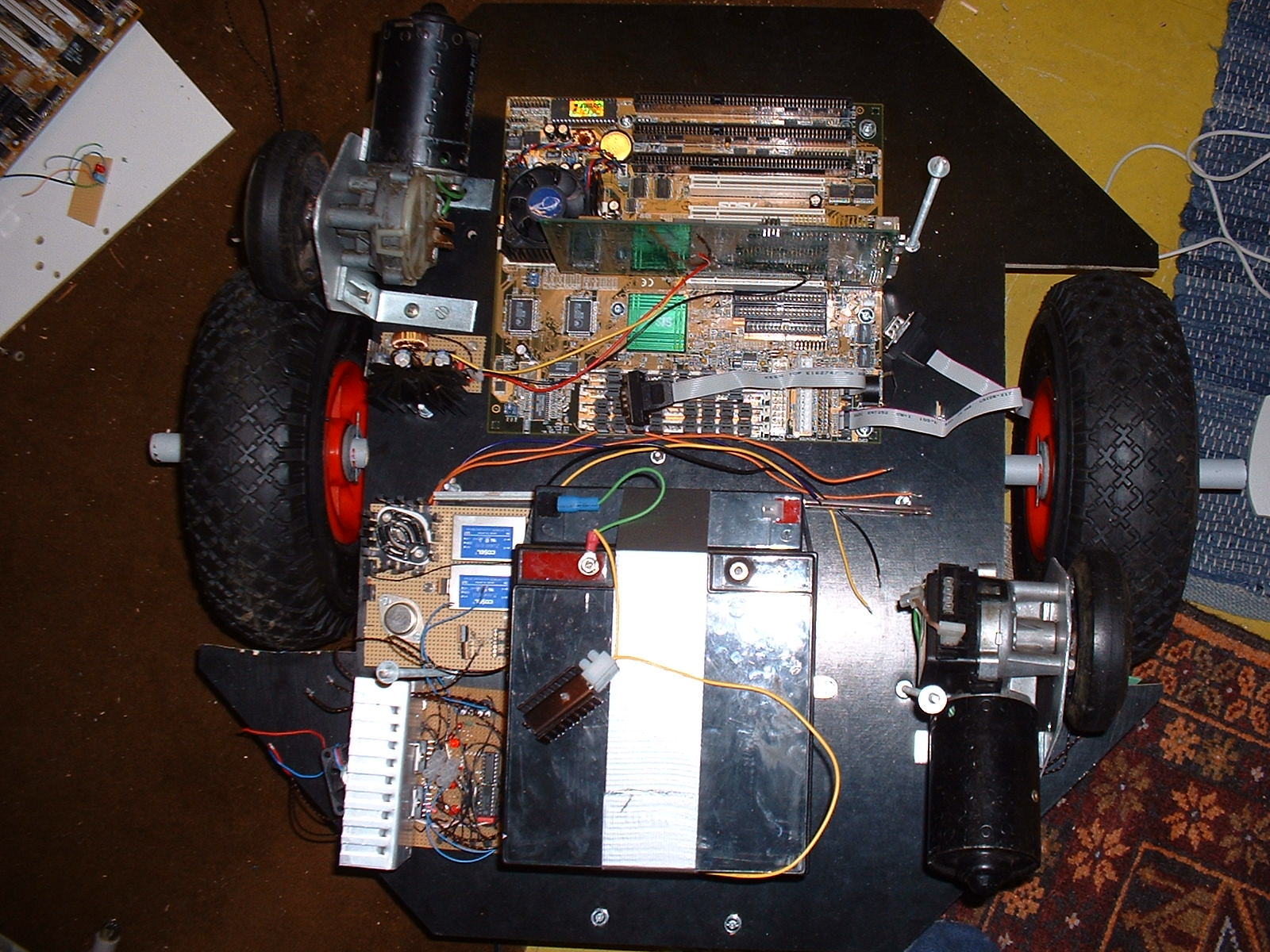 |
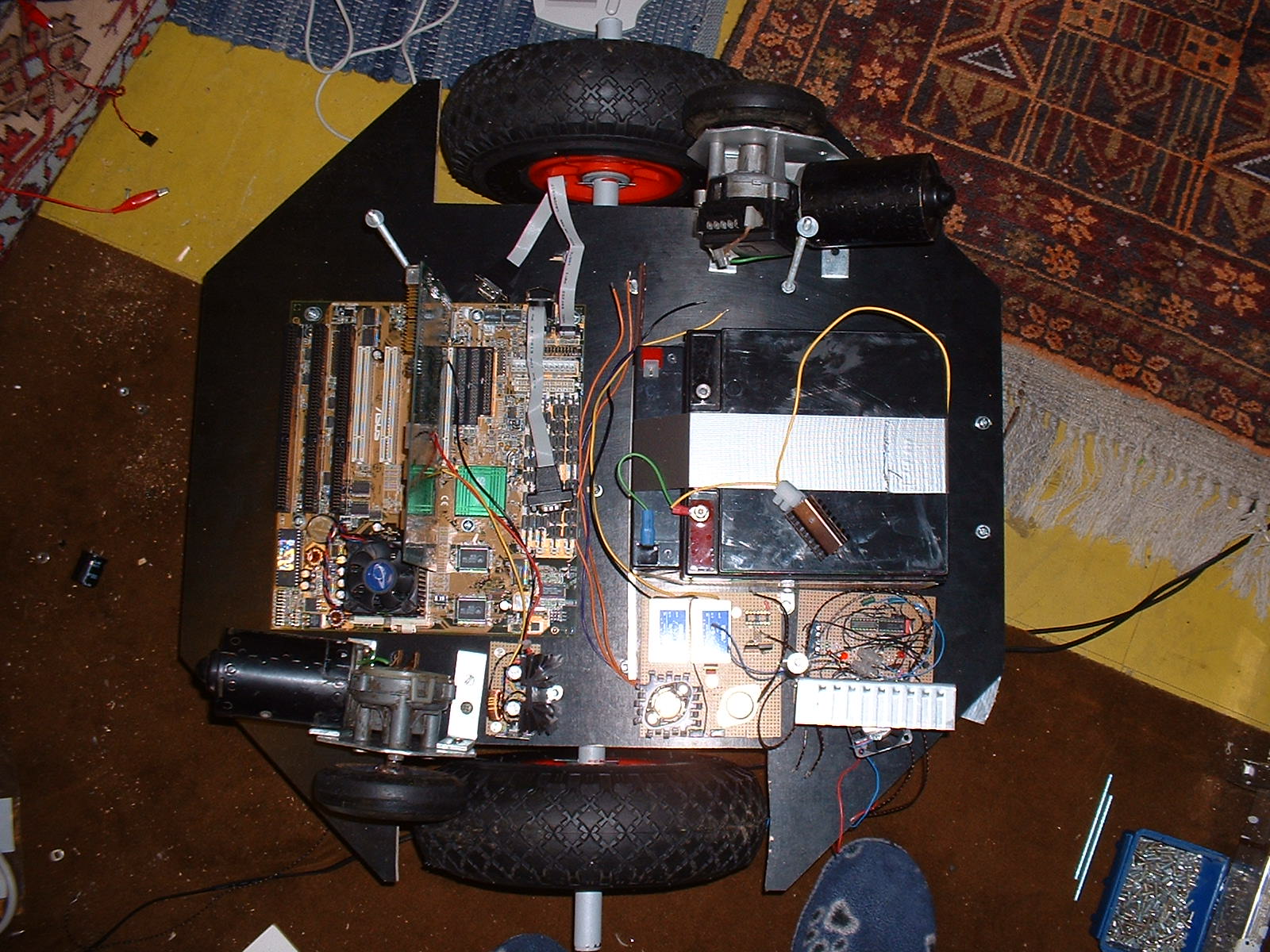
| Hier sieht man das Teil von der Seite mit dem dicken Akku | Und hier eine Aufnahme des Mainboards in der Mitte (P1@100MHz), Stromversorgung (links oben) und Fahrtenregler (links unten) |
 |
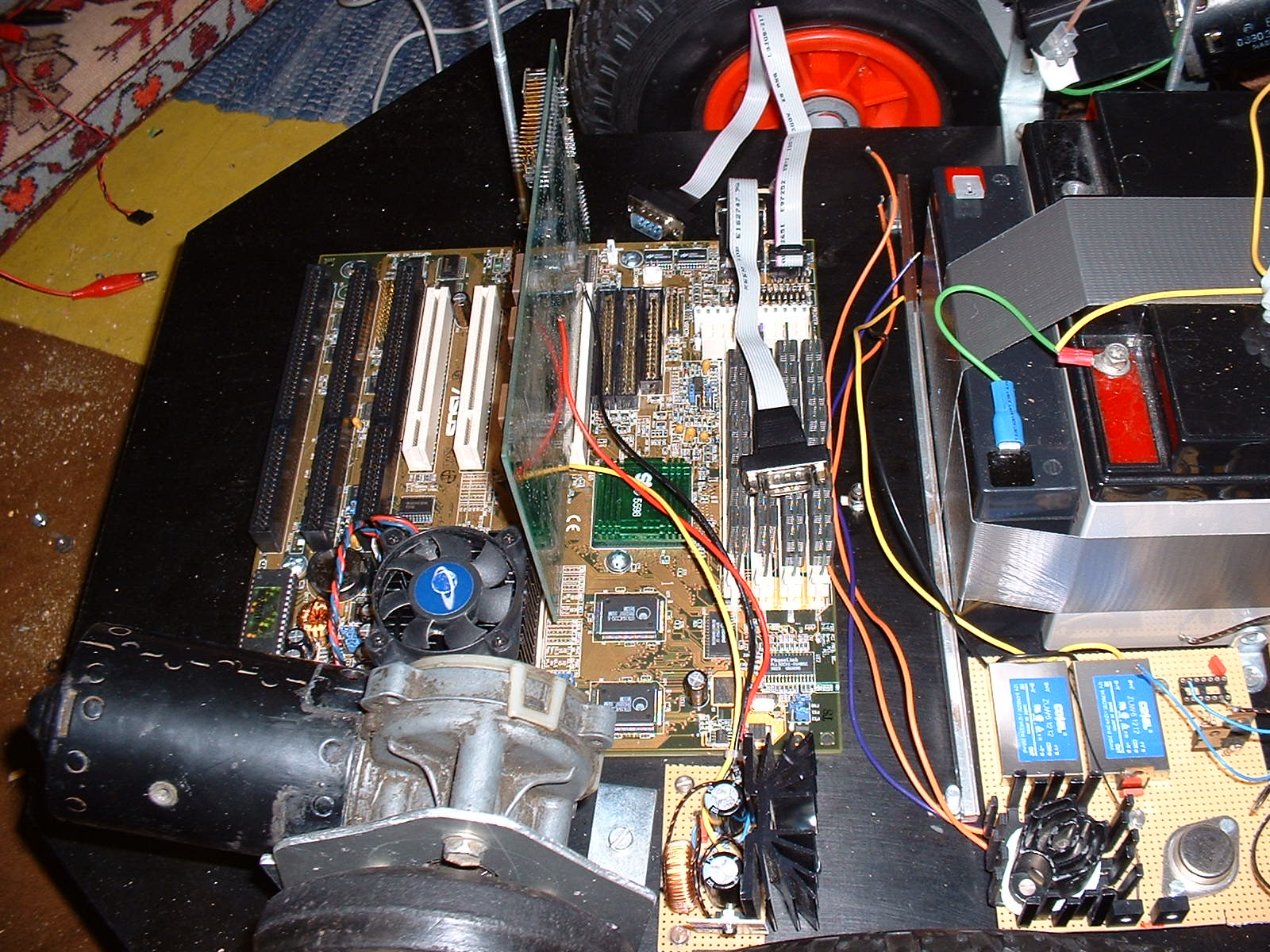 |
| Der Antrieb findet über jeweils ein Reibrad an den Antriebsrädern statt, weil dies am einfachsten zu verwirklichen war | Hier sieht man nochmal Mainboard, 6V Akku, 12V Akku und Spannungsregler |