 Die Inhalte gefallen Dir?
Die Inhalte gefallen Dir?Erstellt irgendwann vor 2006
Der bipolare Schrittmotor:
Dieser Motor ist ebenso wie der unipolare ein Schrittmotor, der durch das Ansprechen seiner Spulen nach einem bestimmten Bitmuster zu betreiben ist. Der einzige Unterschied zu den beiden Modellen liegt in der Art, wie die Spulen angesprochen werden. So werden sie jeweils einmal mit der einen Polung und dann genau verpolt betrieben werden. Daher ist die Ansteuerung eines solchen Motors um einiges schwieriger, jedoch keinesfalls unmöglich - dank der H-Brücke.
Solltet ihr einen Schrittmotor zum ersten Mal in der Hand halten, dann empfehle ich zunächst die Seite über den unipolaren Schrittmotor zu lesen, da hier die Funktionsweisen erklärt werden.
Die Schaltung
Wie bei dem Unipolaren wird hier ebenfalls die parallele Schnittstelle zur Ansteuerung verwendet und mit dem bewährten Prinzip der Opto-Koppler geschützt. Die Schaltung bekommt jetzt nur anstatt des ULN2308 zwei L293D Chips mit integrierten H-Brücken. Diese ermöglichen es die Ausgänge zu verpolen, bei einem Strom von immerhin 600mA pro Ausgang. Das Prinzip einer H-Brücke ist dabei denkbar einfach:
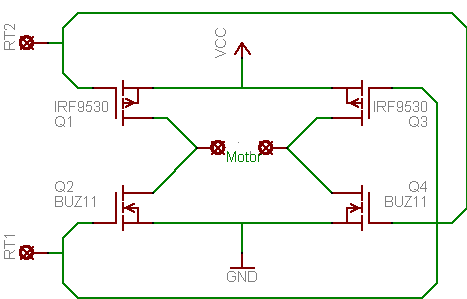
Der Name kommt tatsächlich von der Anordnung der Transistoren. Je nachdem welches paar nun durchschaltet fließt der Strom einmal von links oben nach rechts unten, oder von rechts oben nach links unten. Damit ergibt sich die Möglichkeit die Spulen zu verpolen. Die Kraft die diese Motoren dann besitzen ist dadurch ein ganzes Stück größer, als die der unipolaren.
Hier die Belegung des ICs. Über die vier Input-Pins wird der Chip angesprochen. Über die vier Outputs werden die zwei Spulen des Motors angesprochen. Dabei muss vorher klar sein, welche Anschlusskabel zu welcher Spule gehören, denn Spule 1 muss mit Output 1 - 2 und Spule 2 mit Output 3 - 4 verbunden werden. Die beiden Enable Eingänge müssen auf +5V gelegt werden, damit der Chip "loslegt". Bei meiner Schaltug habe ich das aber über einen Jumper gemacht, damit man die ganze Schaltung auch schnell mal "ausschalten" kann. Über Vss und Vs kommt die Versorgungsspannung (bis 36V). Die vier Masse-Pins in der Mitte werden zusammen geschlossen (das ermöglicht eine bessere Temperatursenkung). Da es sich hier um ein empfindlicheres Bauteil handelt können nicht direkt die 12V verwendet werden um durch die Opto-Koppler die Input-Pins zu steuern. Hier setzt man einfach einen Festspannungsregler 78L05 (100mA) dazwischen, der die Spannung auf genau 5V reduziert.
Mit Hilfe dieses kleinen Spannungsreglers wird der L293D nun mit genau der richtigen Spannung betrieben.
Der Schaltplan
Der Schaltplan der Steuerung sieht auf den ersten Blick etwas verwirrend aus, aber wenn man sich langsam von links nach rechts vorarbeitet ist es dann doch recht simpel.
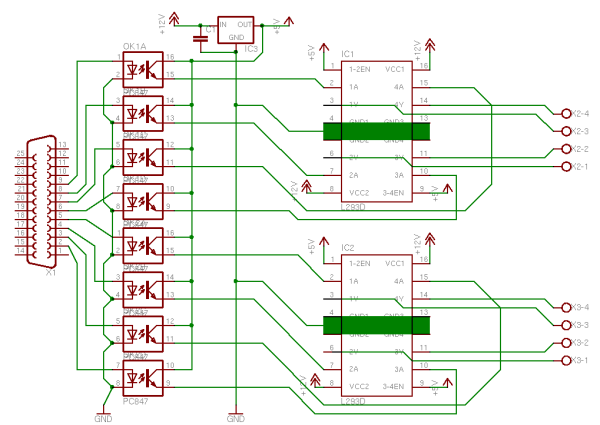
Am Anfang ist wie immer die Schnittstelle, die sofort in den Opto-Kopplern mündet. Die eingehenden 12V werden im Spannungsregler in 5V umgewandelt und in den Collector des Opto-Kopplers eingespeist. Sobald nun eine Data Line auf high gesetzt ist leitet er und lässt die 5V zu einem Input des L293D fließen. Dieser schaltet nun die 12V zu einer Spule des Motors durch und der Motor nimmt eine Stellung ein. Nun muss nur noch wieder das Bitmuster zur Ansteuerung ermittelt werden und schon kann es losgehen.
Leider habe ich bis jetzt noch kein Platinenlayout für diese Schaltung erstellt, da die Platine zweiseitig, oder mit zu vielen Drahtbrücken besetzt sein müsste. Aber ich habe ein Bild von der Lochraster-Platine auf der ich die Schaltung bereits gelötet habe. Der Lüfter und die Kühlkörper auf den Chips sind bei meinem Schrittmotor tatsächlich nötig!
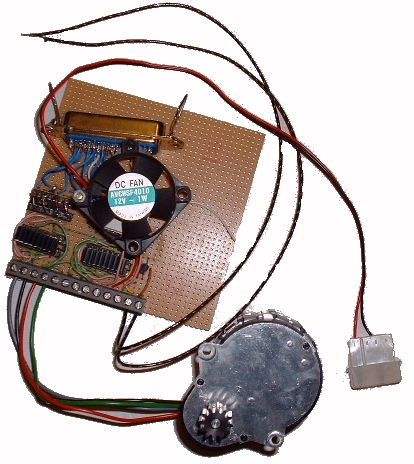
Allerdings habe ich von der falschen Seite begonnen zu Löten (von rechts) und somit musste ich den Optokoppler spiegelverkehrt einbauen. Das war kein Problem, ich musste nur die Anschlussbeinchen auf die andere Seite biegen. Jedoch ist dabei irgendein Fehler passiert, weshalb ich jetzt für den oberen Optokoppler vier simple Dioden hergenommen habe (die sind nicht ganz so sicher wie Optokoppler, aber noch ist nichts passiert, der Chip hat ja auch Freilaufdioden).
Die Beispielprogramme sind unter den unipolaren Motoren am Ende der Seite.