Die Inhalte gefallen Dir?
Die Inhalte gefallen Dir?Erstellt irgendwann vor 2006
Was ist das?
Auch dieses Projekt ist während dem Bau des zweiten Roboters entstanden, nachdem kein Monitor und keine Tastatur am Roboter selbst zur verfügung stand. Dennoch sollte dem Roboter gesagt werden, wohin er fahren soll und wann er überhaupt loslegen darf.
Da uns die RS232 (also die serielle Schnittstelle) am sinnvollsten erschien, da sie leicht zu Programmieren ist und man einen ausreichend großen Datendurchsatz hat musste nurnoch eine Möglichkeit gefunden werden das ganze Kabellos zu übertragen. Bei Conrad gibt es Funkbausätze, die wir aber leider nicht zur Funktion überreden konnten. Also mussten wir uns weiter umsehen. Irgendwann hab ich diese Seite gefunden http://www.hantz.com/asp/NewProducts/Produkte_3.asp?ProduktID=726 und dort haben wir uns dann für das Promi-ESD-02 Modul entschieden, was vom Preis noch erträglich ist. Damit sind Reichweiten von etwa 10m, je nach Beschaffenheit des Raums natürlich, möglich.
Das hier soll nur ein Anreitz für ein eigenes Projekt sein, da alles soweit in den Datenblättern beschrieben ist. Deswegen ist diese Beschreibung auch nur recht knapp. Doch ist es evtl. interessant zu sehen welche Möglichkeiten es gibt.
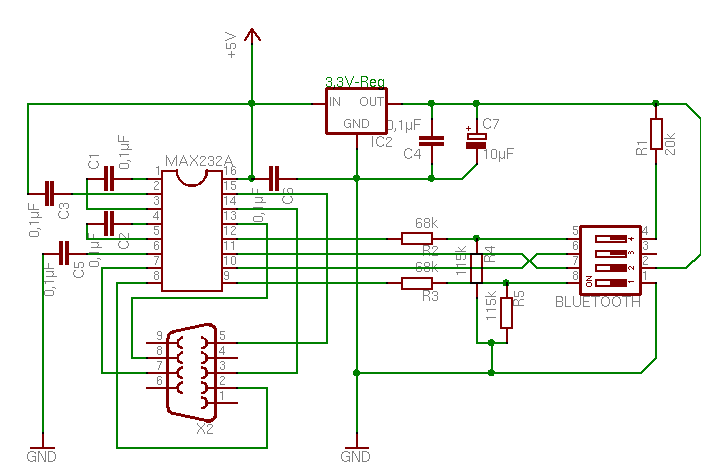
Die externe Beschaltung:
Eigentlich ist dieses Modul schon fast fertig, aber man benötigt eben doch immer noch ein paar Teile, damit es funktioniert. In diesem Fall einen MAX232A, der die Pegelangleichung zwischen dem Modul und dem PC übernimmt, denn die serielle Schnittstelle benötigt spezielle Pegel: Ein High ist bei -12V und ein Low bei +12V. Der MAX ist in der Lage, bei einer Eingangspannung von 5V etwa -10V und +10V zu erzeugen, was noch im Tolleranzbereich der Schnittstelle liegt. Dazu benötigt er lediglich ein paar 0,1µF Kondensatoren, wie im Datenblatt leicht zu erkennen ist. Durch diese große Differenz zwischen beiden Pegeln kann auch eine recht lange Kabelverbindung ohne besondere Schirmung aufgebaut werden.
Das Bluetooth-modul kann nur mit 3,3V betrieben werden, weshalb man also einige Spannungsteiler zwischen den MAX232A und das Modul schalten muss. Diese sind im Datenblatt gut beschrieben; beötigt werden immer jeweils 68k am Ausgang des MAX und 115k zur Masse.
Hier das Datenblatt
Wenn man jetzt alles gemäß Datenblatt bestückt hat, bzw. anstatt dem im Datenblatt erwähnten MAX3238 (den man leider nicht als DIP findet) einen MAX232A hernimmt und dann zwischen dem Modul und dem PC ein Nullmodemkabel legt, kann man nach der Programmierung des Moduls schon fleißig funken. Besonders praktisch ist, dass das Modul ein "ERROR" ausgibt, wenn z.B. keine Verbindung mit dem zweiten Bluetooth-Sender besteht, oder dass es immer bei einem Verbindungsaufbau ein "CONNECT", bzw. ein "DISCONNECT" bei der Trennung ausgibt. Damit lässt sich ein Roboter sehr gut steuern und vorallem ohne Kabel und geschützt vor anderen Einflüssen, wie sie z.B. bei dem Conrad-Modell aufgetreten wären, was auf der Freien 433MHz Frequenz funkt. Denn bei Bluetooth kann man seinen eigenen verschlüsselten Kanal öffnen.
Die Baudrate bei der Schaltung mit dem MAX232A konnten wir übrigens auf maximal 9600 ausreizen, danach war leider Schluss.
Schaltplan
So, weil ich ja immer wieder Anfragen für den Schaltplan meiner externen Beschaltung erhalte hab ich mich jetzt mal aufgerafft und diese im EAGLE "gemalt". Leider hat sich dort kein geeignetes Teil gefunden, weshalb ich für das Modul einfach einen Dip-Schalter (Mäuseklavier) hergenommen habe. Aber das erkennt man schon.
Wenn man die Schaltung fertig aufgebaut hat, dann kann über ein Nullmodemkabel eine Verbindung zwischen dem PC und dem Bluetooth-Modul hergestellt werden. Also wichtig: bei der Schaltung einen männlichen Stecker einlöten. Dann muss an die Schaltung eine Spannung von 5V angelegt werden, über die der MAX232A betrieben wird und gleich dazu noch ein Spannungsregler für 3,3V, der das Bluetooth-modul versorgt.
Das wars eigentlich schon (die EAGLE-Datei ist mit der Grafik verlinkt).